Drony stają się dla nas coraz bardziej dostępne – już za
kilkaset złotych można cieszyć się wersją mini. Z drugiej strony profesjonalne rozwiązania
oferujące wyszukane algorytmy do nawigacji są bardzo drogie. Czy da się
połączyć niską cenę z autonomią drona? Za pomocą MATLABa być może tak!
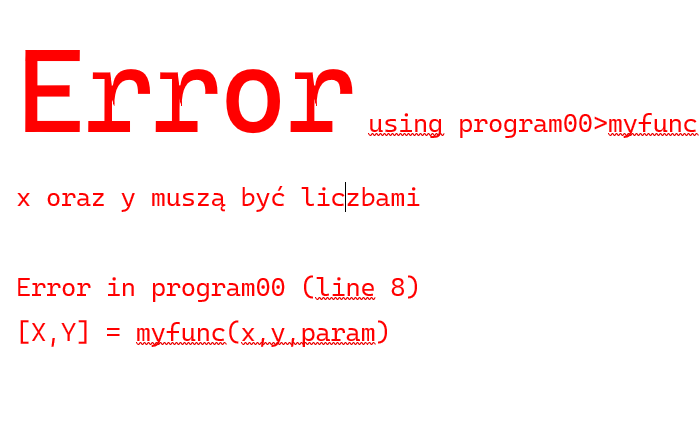
W jaki sposób ulepszyć samodzielnie pisane funkcje w
MATLABie? Jak łatwo zaimplementować obsługę błędów związaną z przekazywanymi do
funkcji argumentami (zmiennymi)? W tym wpisie zajmę się względnie nową
funkcjonalnością MATLABa czyli walidacją argumentów funkcji za pomocą struktury
arguments .. end.
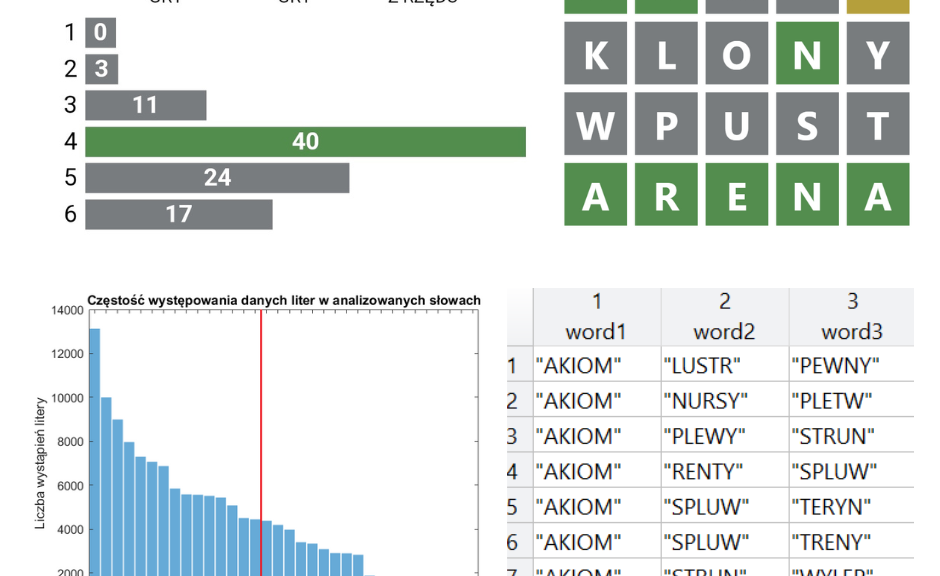
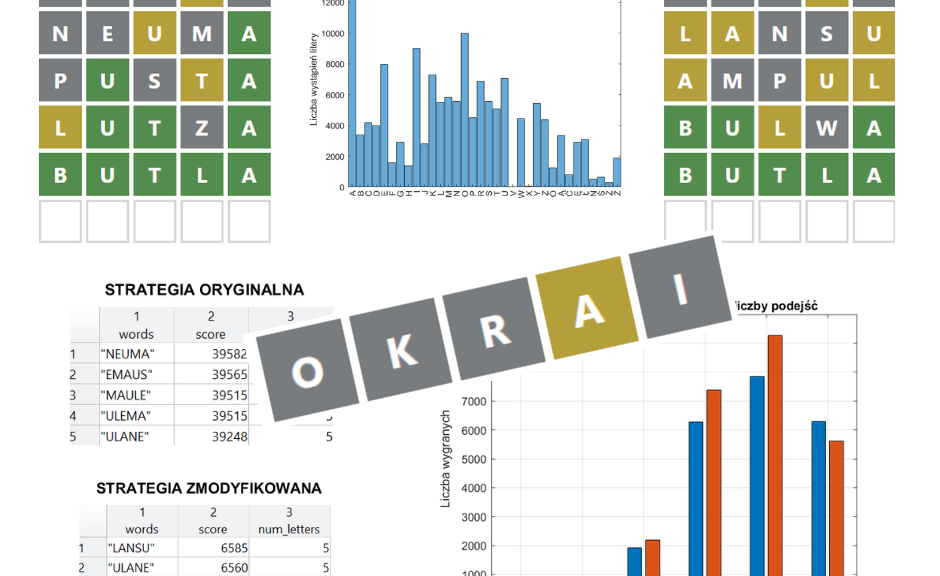
Trzecia część wpisu autorstwa Michała Hałonia dotyczy metody wpisywania tych samych trzech słów przy każdej rozgrywce. MATLAB w tym przypadku zostaje wykorzystany jedynie na etapie znalezienia odpowiedniego zestawu wyrazów.
Autorem wpisu jest Michał Hałoń – doktorant na Wydziale Elektroniki i Technik Informacyjnych Politechniki Warszawskiej. W drugiej części wpisu ocenia skuteczność opisywanej metody na podstawie wszystkich możliwych rozgrywek i dokonuje próby udoskonalenia algorytmu w celu zwiększenia jego dokładności.
Dzisiaj wpis w formie filmu. Przez ostatnich kilka wpisów zmagaliśmy się z aproksymacją danych pomiarowych. MATLAB oferuje wiele narzędzi w tym zakresie. Czas uporządkować wiedzę.
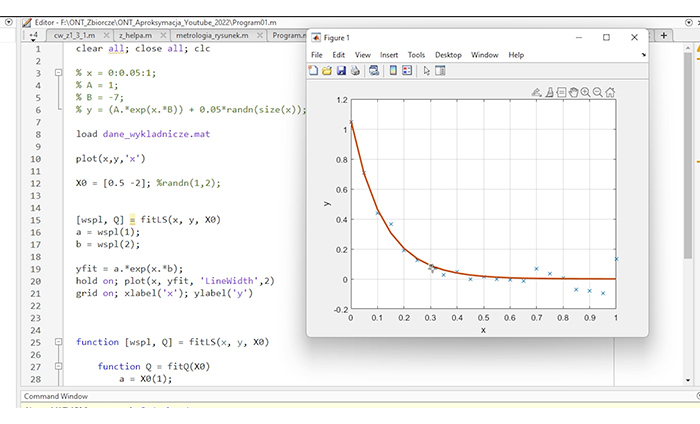
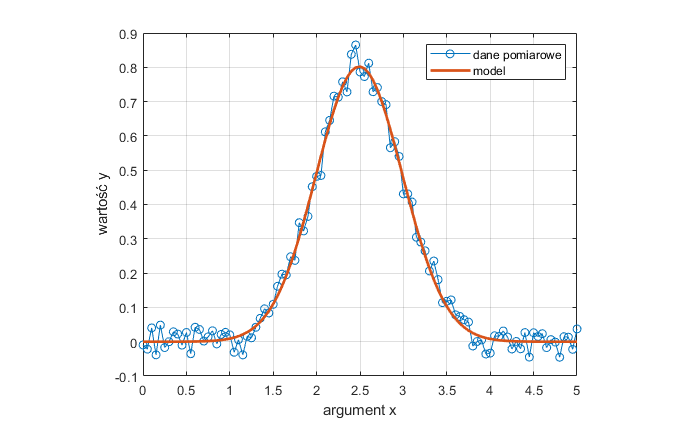
W poprzednich wpisach o aproksymacji danych pomiarowych była
mowa o modelach liniowych i estymatorze LS. Często jednak jest potrzeba
aproksymacji modelami nieliniowymi. W tym wpisie zajmę się tym zagadnieniem.
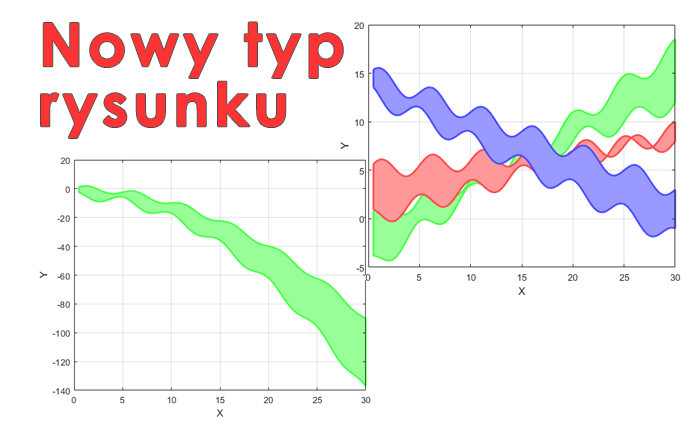
Zadanie na dzisiaj jest bardzo proste. Uzyskać w MATLABie
taki rysunek jak poniżej: wypełniony obszar, ograniczony „od góry” i „od dołu”
dowolną krzywą. Nie ma takiej funkcji w MATLABie? Napiszemy ją sami!
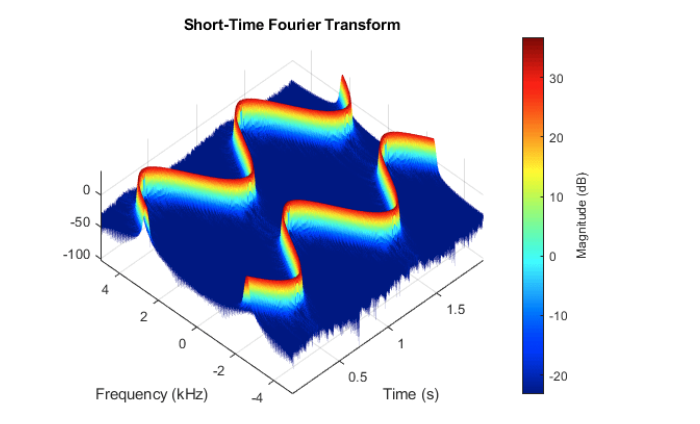
Jakiś czas temu na naszym blogu opublikowałem serię wpisów na temat (dyskretnej) transformaty Fouriera – DFT (część 1, część 2, część 3). Omawiałem w nich cechy i właściwości tego narzędzia do analizy częstotliwościowej sygnałów, a domknięciem był film na temat konsekwencji próbkowania sygnałów. Bieżący wpis w dużej mierze bazuje na tamtej serii artykułów i dotyczy metod czasowo – częstotliwościowej analizy sygnałów. Metody te, w pewnym sensie, są rozszerzeniem klasycznej transformaty Fouriera na obszar sygnałów niestacjonarnych. Co to oznacza?
Kontynuuje omawianie metody LS do aproksymacji danych
pomiarowych. Tym razem na warsztat idzie algorytm LS w postaci macierzowej, który
umożliwia zastosowaniem modeli wyższych rzędów. Zobaczmy jak dopasować parabolę
do danych układających się w ten właśnie kształt.
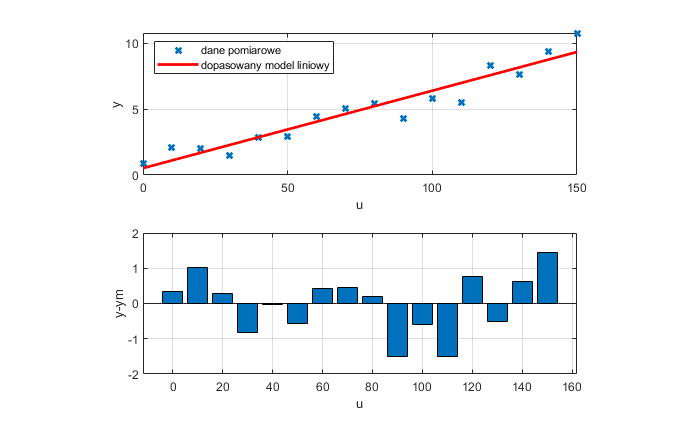
Metoda najmniejszej sumy kwadratów (LS - Least Squares) jest
powszechnie wykorzystywana do aproksymacji danych pomiarowych modelami różnych
rzędów. Tak jest również w przypadku MATLABa i oferowanych przez curve fitting
toolbox funkcji. W tym wpisie zajmę się wytłumaczeniem na czym ta metoda polega
oraz jakie są jej cechy. Pozwoli to Wam świadomie wykonywać aproksymacje danych
bez często popełnianych przez użytkowników błędów.